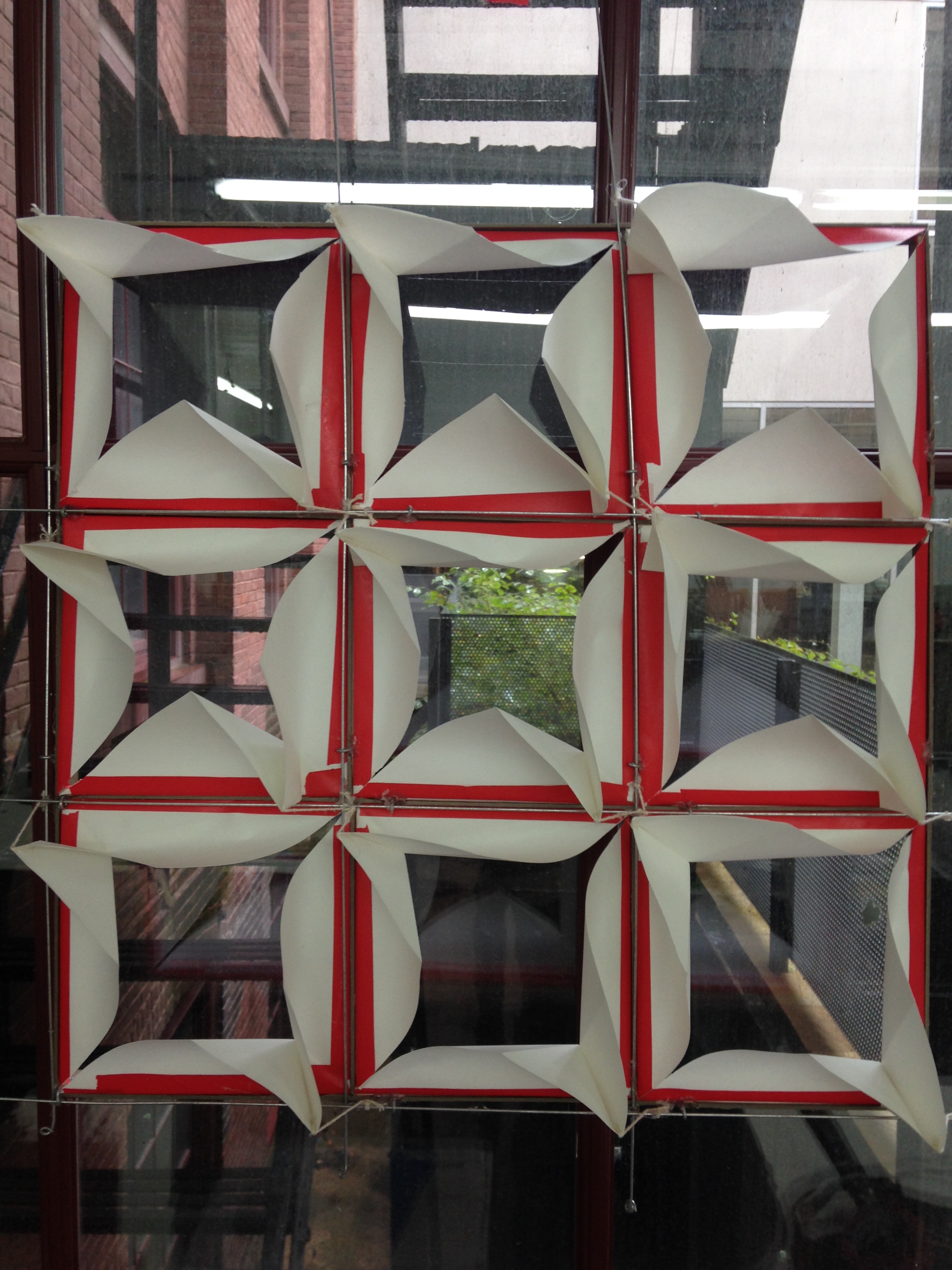
The project is a window interface system that responds to real-time weather and human interaction to promote ideal interior conditions.
The screen responds on three levels: Temperature, Exposure and Human Interaction.

In order to respond in real-time, I’m using an Arduino, servo motor and lux sensor to determine light levels and exposure.

The screen is made of a series of identical modules with a top and bottom flap that open through the use of small motors and data. Variation in the screen occurs as a product of hyper local weather data and responds as a membrane, opening and closing to bring a state of stasis.


The way in which the screen responds is seasonal.
WINTER
In winter months, when temperatures are cold, the bottom half of each module opens to bounce light into the interior and harness solar warmth.


When the bottom flaps are at 90°, the interior receives more bounced light.

SPRING/FALL
In the spring/fall when weather conditions are in an ideal state, the screen responds to human movement through pattern shifting.

Through variation in the membrane, light patterns shift in the interior.
SUMMER
In the summer months, when temperatures are hot, the top half of the module moves to block and reflect direct light, adding shade and helping to cool the interior.


When top flaps are at 90°, light in the interior is reduced.














You must be logged in to post a comment.